"The MyWorld funding is a game-changer for developing and implementing our AGITO control software and advanced sensor integration! With the financial backing, we need to design, create, and test the sleek Commander software and the innovative Sonar proximity detection add-on, we're poised to make a splash in the industry.
We're beyond excited about the opportunity to revolutionise AGITO operations, boosting creative freedom, supercharging scalability, and enhancing safety in feature/long-form/broadcast and live event productions. This funding is the key to assembling a powerhouse team of professionals, investing in state-of-the-art technology, and refining the AGITO systems to reach new heights.
MyWorld's commitment to driving sustainable, inclusive growth is a perfect match for our vision of the AGITO project. Their support will empower us to generate new job opportunities and cultivate skills in the creative technology sector while ensuring that a diverse audience enjoys the project's benefits. Together, we're set to make a lasting impact on the world of cinematography and live events!"
Organisation details
The Motion Impossible team consists of four members.
Ben Dair, Chief Product Officer and Project Manager for the project.
Robert Stephenson, Software Engineer and Behavioural Roboticist, skilled in robotics and web development.
Dan Baines, Mechatronics Engineer, specializes in embedded software and motor control.
Alex Harrison, a multi-talented Product Specialist, providing product development feedback and customer validation.
Project details
Working with NVIDIA, the project aims to develop a lightweight control and visualisation software for AGITO systems, eliminating the need for a one-to-one Master Controller relationship while adding motion control features and libraries for AGITO Sports, AGITO Trax, and AGITO MagTrax configurations. The centralised software will enable pre-determined AGITO movement and control during cinematography or event sequences, allowing unrestricted use of AGITO systems and fostering creative freedom.
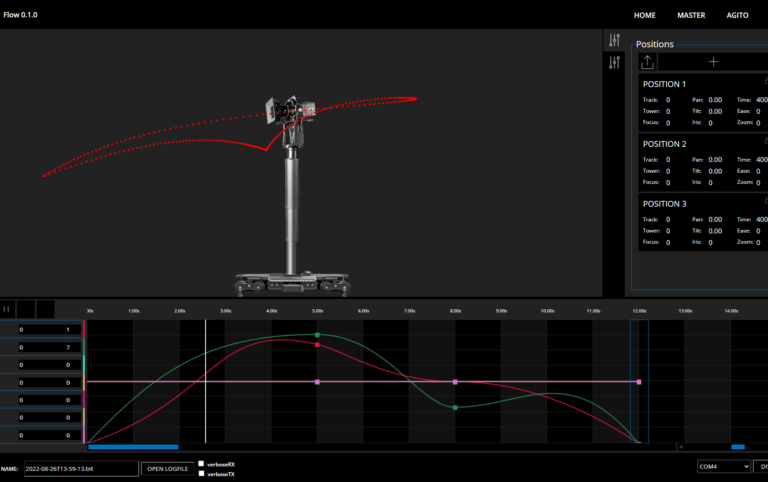
The software, known as the Commander, will be compatible with PCs, laptops, tablets, and phones. It will facilitate the creation of action libraries for productions and define unique actions/movements specific to different productions or shows. Standard camera movements can be recalled on command and incorporated into an animation timeline, akin to managing motion capture animation in Autodesk Motion Builder software.
The project proposal comprises two components: software control and hardware sensor integration. The latter includes a proximity detection add-on called Sonar. Operators will also have access to a first-person view (FPV) solution, which is essential for non-line-of-sight operations from a health and safety perspective.
Safety measures are paramount for the automated replay of camera movement when autonomously executing multiple AGITO systems. The project will integrate proximity detection and collision risk assessment, providing up to 6-meter lookahead within the environment. In case of detected obstacles, the software will automatically halt the corresponding AGITO without operator intervention.
Although advanced collision avoidance is beyond the project’s scope and budget, the proposed centralised software control and sensor integration solution will significantly enhance safety and creativity in AGITO operations.